无人驾驶仿真实验平台方案之---无人移动采集平台方案
交通大数据采集平台
智能网联汽车在国家政策支持遍地开花,已经成为国内资本追逐的热点方向,
本产品方案基于智能网联顶层设计,对智能汽车、驾驶人员、路侧协同设计、交通环境、云控中心、
模拟器回放(分别为独立设计方案,已预留互联接口)做了整体设计,以下主要介绍相关针对移动采集单元的设计:
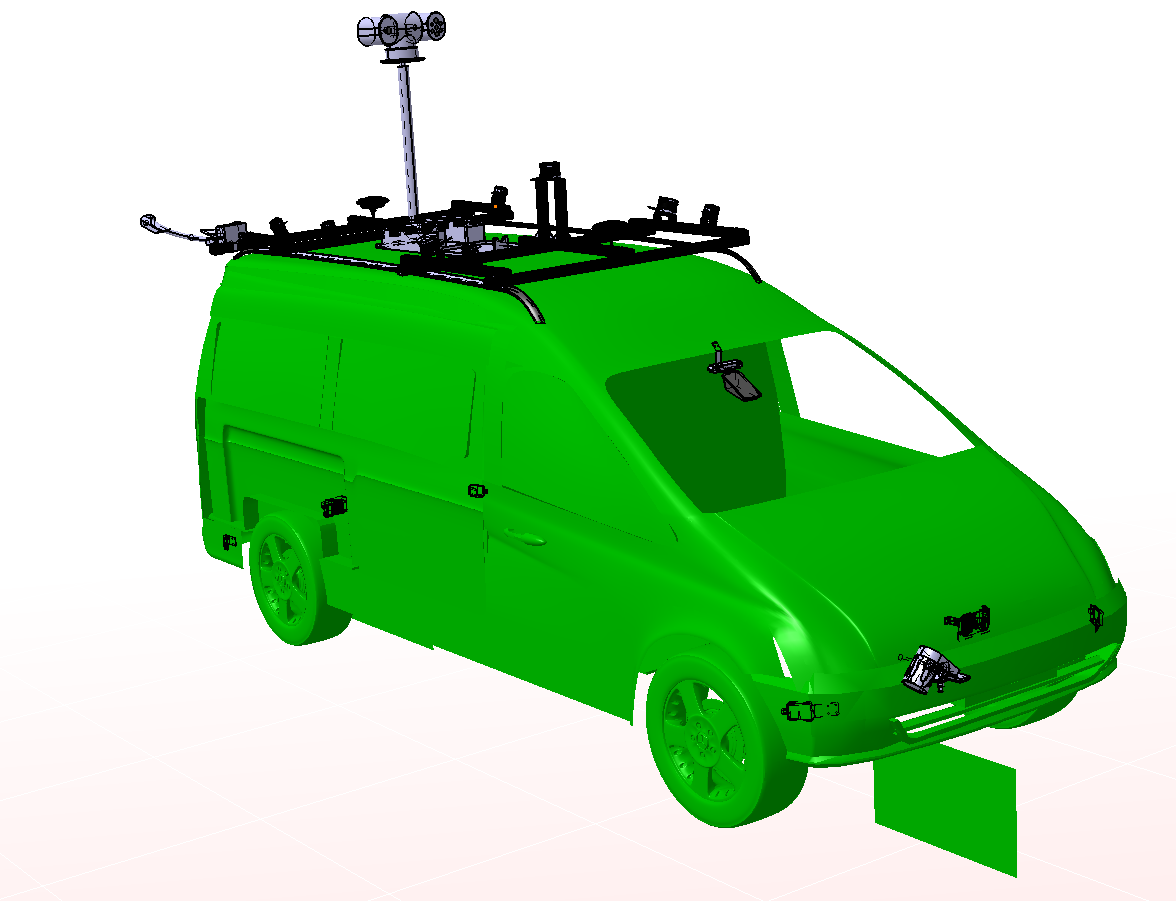
整车的设计架构:

本车车载设备已经全具备无人驾驶车环境感知全部传感器数据,为无人驾驶训练模型提供足够的实际路况,
通过数据融合、汇总、加工,与实体模拟器对接后为无人驾驶车提供更快速、更优化数据算法。
采集车数据包括:
-
采集车辆运行状态即实车的行车数据(实时车速、加速度,踏板操作、方向盘数据、发动机转速、油耗等);
CAN-bus 网络,构成汽车数据采集的 CAN-bus 网络控制节点,便于汽车CAN数据抓取。通过读取车辆CAN协议数据,
采集实时的行车数据如实时车速、踏板操作、发动机转速、方向盘数据、油耗、机油温度等

2. 采集外部道路环境感知数据(当前车道、实车车距、标志标线、对方车速、车距、车型等);
2.1双目相机


2.2环视相机

2.3激光雷达


32线激光雷达点云数据
2.4毫米波


3.采集自然环境感知数据(路面温度、能见度、路面水层厚度、冰层厚度、雪层厚度等);

4、采集驾驶行为特征感知数据(驾驶人操控行为和感知行为等)

车辆可实时回传数据:
回传的车辆行为特征数据至少包括:本车的行驶轨迹、车速、周边车辆的相对位置、速度,
车道数,气象数据(路面温度、能见度、路面水层厚度、冰层厚度、雪层厚度、路面温度、路面状态,
湿滑系数,空气温湿度)。
业务联系电话:010-80701018